ros教程,从安装到基础操作
1. AutolaborROS机器人入门课程 这是一套免费、零基础、理论与实践相结合的ROS教程,涵盖了ROS的基本概念、通信机制、运行管理、常用组件、机器人仿真、导航、平台设计等内容。课程提供了视频演示、讲义下载和答疑群,适合有志于机器人开发的学习者。
2. ROS基础篇(一) 最新学习路线 本文介绍了ROS的官网资料、Diego Robot系列机器人开发目录、古月居大神专栏等学习资源,以及一些ROS相关的博客文章。适合想要从入门到进阶的ROS学习者,提供了丰富的教程和案例。
3. ROS学习笔记(一) 本文介绍了ROS的基本概念、安装步骤和入门教程,以及作者的学习经历和心得。文章适合对ROS感兴趣的初学者,也提供了ROS 1自动安装教程的链接。
4. ROS Wiki教程 本网页提供了ROS的基本和高级教程,涵盖了ROS的核心概念、软件包、节点、话题、服务、参数、消息、客户端API等。还介绍了如何使用ROS在多机器人上、自定义消息、在Python中使用C 类、在ROS中使用Qt等。
5. 中国大学MOOC《机器人操作系统入门》讲义 本讲义是中国大学MOOC课程《机器人操作系统入门》的配套材料,由中科院软件所和重德智能公司共同推出,介绍ROS的基本原理和用法。讲义分为十个章节,附有教学代码示例,长期维护,永久公开。
6. ROS学习入门教程 本文介绍了ROS的基本概念、安装步骤和入门教程,以及作者的学习经历和心得。文章适合对ROS感兴趣的初学者,也提供了ROS 1自动安装教程的链接。
希望这些资源能帮助你更好地学习和掌握ROS。如果有任何问题,欢迎随时提问!
ROS入门教程:从安装到基础操作
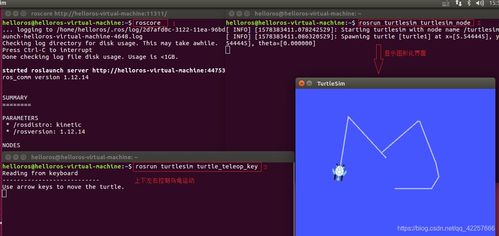
ROS(Robot Operating System,机器人操作系统)是一个用于机器人开发的跨平台、模块化软件框架。本文将为您提供一个详细的ROS入门教程,从安装到基础操作,帮助您快速上手ROS。
一、ROS简介
ROS是一个开源的机器人操作系统,它提供了一个丰富的库和工具,用于开发、测试和部署机器人应用程序。ROS支持多种编程语言,包括C 、Python、Lisp等,并且拥有一个强大的社区支持。
二、安装ROS
在安装ROS之前,请确保您的计算机满足以下要求:
操作系统:Ubuntu 18.04或更高版本
硬件:至少4GB内存
以下是安装ROS Noetic的步骤:
打开终端。
输入以下命令更新系统:
sudo apt update
安装依赖项:
sudo apt install -y python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
创建ROS工作空间:
mkdir -p ~/catkin_ws/src
初始化catkin_make:
cd ~/catkin_ws
catkin_make
配置环境变量:
source devel/setup.bash
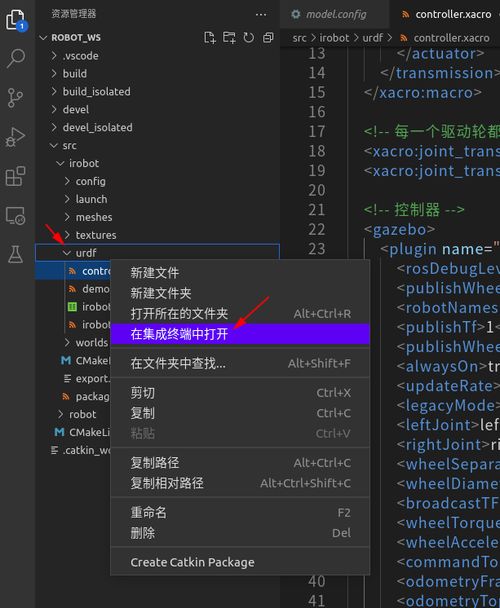
三、创建ROS包
ROS包是ROS应用程序的基本单元。以下是创建一个简单ROS包的步骤:
在ROS工作空间中创建一个新目录,例如:
cd ~/catkin_ws/src
mkdir -p my_package
进入新创建的目录:
cd my_package
创建CMakeLists.txt和package.xml文件:
catkin_create_pkg my_package std_msgs rospy roscpp
编辑CMakeLists.txt和package.xml文件,添加必要的依赖项和描述信息。
在终端中,进入ROS工作空间根目录,并运行以下命令编译包:
cd ~/catkin_ws
catkin_make
四、编写ROS节点
ROS节点是ROS应用程序的核心,负责处理任务和与其他节点通信。以下是一个简单的Python节点示例:
!/usr/bin/env python
import rospy
from std_msgs.msg import String
def talker():
pub = rospy.Publisher('chatter', String, queue_size=10)
rospy.init_node('talker', anonymous=True)
rate = rospy.Rate(10) 10hz
while not rospy.is_shutdown():
hello_str = \




